
Guia básico do Drone Racer
Você não sabe NADA sobre mini drones? Você já é aeromodelista e está querendo entrar no mundo dos drones? É automodelista e agora quer adicionar uma dimensão ao seu hobby? Ou apenas viu os drones de corrida da DRL na ESPN e agora está curioso?
Você está no lugar certo.

É muito comum ler e ouvir por ai “Eu sou novato com drones”, ou “Já sou aeromodelista/automodelista mas não conheço de drones”, e mesmo curiosos que nunca viram nada sobre aeromodelos mas querem aprender sobre os drones (especialmente os de corrida e freestyle).
Este sentimento é normal, acontece especialmente porque “drone” é um assunto relativamente novo na comunidade de aeromodelismo. Além disso, a inovação tecnológica é muito grande, e muito rápida, então em um intervalo de poucos meses muita coisa muda.
O objetivo deste artigo é oferecer um caminho de aprendizado, de forma simplificada, sem aprofundamentos técnicos. Se você planeja construir o seu primeiro drone, você vai precisar buscar informações mais detalhadas sobre todos os aspectos abordados aqui.
O que é um drone?
Drone é o nome popular dos “quadricópteros”, são aeronaves do tipo “multirotor”, onde as únicas partes móveis são os motores. A palavra “Drone” significa “aeronave autônoma”, mas a definição acabou se expandindo e passou a descrever praticamente qualquer aeronave multirotor.
Mini-drones, também conhecidos como drones de corrida ou drones de manobra, são versões menores e mais simplificadas dos drones convencionais. Normalmente são feitos em fibra de carbono para que sejam muito resistentes e ainda assim mantenham o peso baixo.
Como funciona um drone?
Quadricópteros são elétricos por definição. Dificilmente verá uma aeronave multirotor com motor a combustão. Sendo um aeromodelo exclusivamente elétrico, ele precisa de uma bateria para funcionar.
Para voar, o drone controla a velocidade de cada um dos seus 4 motores individualmente. Variações na velocidade dos motores é o que faz com que o drone mude sua atitude durante o voo.
A variação da velocidade dos motores é controlada por um computador, chamado “Controlador de Voo” (Flight Controller). Este computador de voo controla cada um dos 4 motores individualmente. E para isso ele recebe os comandos do rádio controle (que está na mão do piloto), e também recebe dados de sensores integrados ao computador, como Giroscópio e acelerômetro.
A maioria dos drones “fabricados”, como os DJI por exemplo, possuem eletrônica sofisticada e são dotados de muitos sensores (GPS, Barômetro, Sonar, Câmeras de posicionamento, Acelerômetros, Giroscópios, etc). Porém, os drones de corrida são muito mais simples: A maioria tem apenas um giroscópio para estabilizar o voo, e mais nada.
Quais são os componentes básicos de um drone racer?
Os componentes básicos são:
- 4 Hélices (duas que giram no sentido horário, e duas no sentido anti-horário)
- 4 Motores elétricos
- 4 ESCs (controladores de velocidade)
- 1 placa controladora de voo (Flight Controller)
- 1 receptor de rádio controle
Se o drone tiver a capacidade de transmitir vídeo FPV, ele também vai precisar de:
- 1 transmissor de vídeo
- 1 câmera
Vou detalhar os componentes a seguir:
Hélices

Feitas de plástico (Nylon, ABS ou Policarbonato), são responsáveis por transformar a rotação dos motores em empuxo.
Motores elétricos

pro-cam
Os motores são fixados nas extremidades dos braços do drone. A maioria usa motores sem escovas (Brushless), o que obriga o uso de ESCs para controlar a velocidade dos motores.
ESCs

ESC significa Electronic Speed Controller, ou controlador eletrônico de velocidade. Ele é responsável por controlar a velocidade de um motor. Em um quadricóptero, são necessários 4 motores e 4 ESCs (um para cada motor).
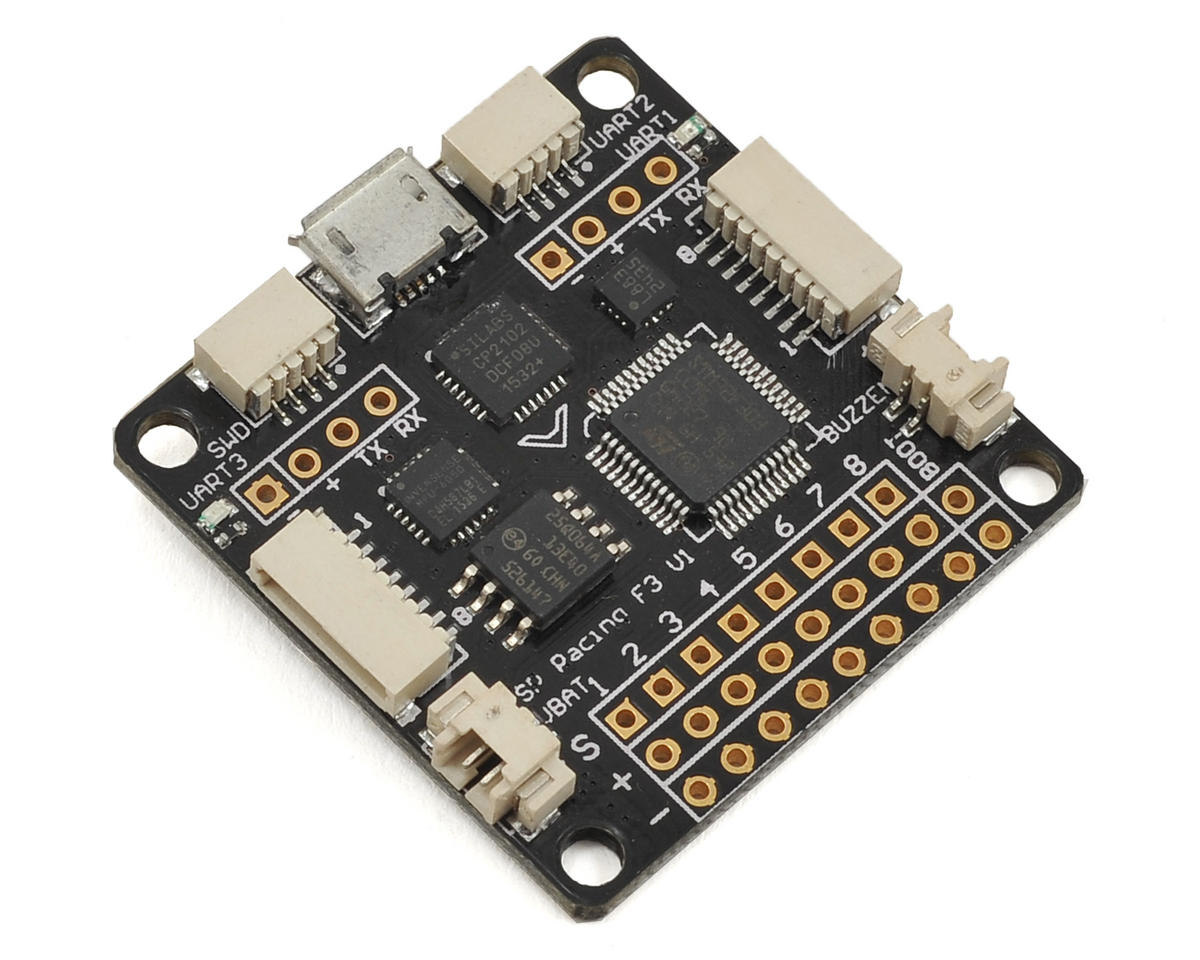
Controladora de voo

A placa controladora de voo é um computador simplificado, dotado de um processador, memória, e pelo menos um giroscópio. Neste computador roda um software de estabilização de voo (firmware). Nos mini-drones o software mais comum é o BetaFlight. Esta placa é parte fundamental do drone.
Receptor de rádio controle (RX)

O receptor é um circuito especial capaz de receber as ondas de rádio transmitidas pelo rádio-controle na mão do piloto, e traduzir em comandos para a controladora de voo.
Transmissor de vídeo

É um pequeno aparelho capaz de receber as imagens da câmera e transmiti-las por ondas de rádio para os óculos FPV do piloto. O transmissor normalmente funciona na frequência de 5.8Ghz e é dotado de uma antena.
Câmera FPV

É através desta câmera que o piloto FPV enxerga o que vem a frente do drone. Ela deve ser pequena e leve, e deve ser capaz de oferecer uma imagem limpa e clara.
Quais as diferenças entre um drone e um aeromodelo convencional?
Esta é a principal dúvida dos aeromodelistas que pretendem começar no mundo dos drones.
Em um aeromodelo convencional, todos os componentes eletro-eletrônicos são ligados diretamente no receptor de rádio. ESC, Servos, interruptores… Cada componente ocupa um canal do rádio, e não existe um computador embarcado no aeromodelo.
Toda a programação de “funções” do aeromodelo fica a cargo do rádio-controle… Desde mixagem de canais até controle de luzes, flaps, e outras funções como controle exponencial (curva suave de controle), rates, limites de atuação e etc.
Em um drone, toda a programação está no computador de voo, e tudo precisa ser ajustado através dele. Além disso, na maioria dos drones não se utiliza mais “canais”, utiliza-se apenas um cabo para comunicação do receptor com a controladora, através de um protocolo digital de comunicação (como SBUS por exemplo – mas existem outros).
Em drones normalmente há duas linhas de energia elétrica: A principal, que é onde a bateria e os ESCs são ligados, e uma secundária, de 5V, responsável por alimentar apenas os componentes eletrônicos do aeromodelo.
Toda a eletrônica funciona com 5V (RX, Controladora e Câmera). Alguns transmissores de vídeo funcionam com 5V também, mas a maioria deles vão ligados diretamente na linha principal.
A linha principal tem tensão variável, de acordo com o tipo da bateria que está sendo usado. Normalmente com baterias 4S a tensão é de 16V, e com 3S, 12V.
Portanto, para alimentar a linha de 5V, é necessário um circuito redutor de tensão (Step down). Existem diversas formas de se obter uma linha de 5V no drone, a mais comum é utilizando uma PDB (placa de distribuição de energia) que tem um circuito step down integrado.
E é difícil voar um drone
Pilotar um drone racer é mais difícil do que um drone convencional, pois normalmente o drone convencional tem sensores (como GPS, Barômetro e Sonar) que permitem que ele fique parado no ar de forma estável, sem intervenção do piloto. Já um mini drone não possui estes sensores, e por isso dependem que o piloto estabilize e faça as correções o tempo todo.
Uma forma de aprender a pilotar os mini drones é usando simuladores. Eles ajudam MUITO no início do aprendizado, que é justamente a etapa mais difícil e quando mais quebramos drones. Depois de algumas poucas horas no simulador, já é possível pilotar um drone real com um mínimo de controle.
Um ótimo simulador para iniciar é o FPV Freerider. Ele é grátis para testar (apenas um mapa disponível), e se você gostar, pode comprar a versão completa por apenas US$ 5.
Conclusão
Como falei, este artigo não tem a intenção de ser um guia completo, mas sim uma breve introdução ao assunto. Aqui no FPV Sampa existem diversos outros com detalhamento maior sobre cada aspecto que envolve a construção e o uso dos mini drones. Se você ficou com alguma dúvida ou quer sugerir um tema para um próximo artigo, deixe um comentário!