
O Drone não arma. Como resolver?
Um problema muito comum quando se é iniciante, é não conseguir fazer o drone armar. Normalmente isso acontece por algum problema simples de resolver. Vou demonstrar a seguir as principais causas e como resolver.
Este artigo se destina apenas a drones que usam controladoras com BetaFlight ou CleanFlight. Se você tem APM, Naza, OpenPilot, LibrePilot ou alguma outra que não roda BetaFlight ou CleanFlight, este artigo não é para você.
O drone não vai armar apenas nas seguintes situações:
- O comando de armar não está sendo reconhecido pela controladora (interruptor no rádio ou comando nas alavancas).
- O drone não está em uma superfície nivelada.
- O acelerômetro nunca foi calibrado.
- O acelerador não está totalmente abaixado.
- A carga da CPU está alta demais.
Vou detalhar cada um destes problemas a seguir:
O comando de armar não está sendo reconhecido pela controladora
Nota: se você arma seu drone usando comando de alavanca (alavanca do acelerador para baixo e para a direita), troque imediatamente por um comando de interruptor. Este tipo de comando é perigoso e deve ser evitado a todo custo.
Você provavelmente tem um canal do seu rádio dedicado a tarefa de armar e desarmar o drone. Normalmente você usa o canal 5 do rádio (AUX1 no BetaFlight) para isso. Então tudo o que você precisa fazer é conectar o drone ao computador, e no BetaFlight, na aba “Receiver”, conferir se o seu interruptor de armar está sendo reconhecido pela controladora.

Mexa o interruptor no rádio e preste atenção em qual canal é sensibilizado. Então, vá na aba “Modes” e verifique se o modo ARM está ajustado para o mesmo canal. Verifique também se o valor da chave fica sempre entre 1000 e 2000. Se ele ficar inferior a 1000 ou superior a 2000, você vai precisar ajustar os Endpoints no rádio para evitar isso e ficar dentro destes limites.
O drone não está em uma superfície nivelada.
Toda vez que você liga a bateria no drone, a controladora vai tentar calibrar o giroscópio. E para isso, o drone vai precisar ficar parado em uma superficie nivelada por uns 2 segundos. Se você conectar a bateria no drone e ficar segurando ele com a mão, você não vai permitir que ele faça a calibração do giroscópio, e ele não vai armar enquanto ele não fizer este procedimento.
Além disso, por padrão, o BetaFlight só permite armar o drone se ele estiver em uma superfície plana e nivelada (exatamente alinhado com o horizonte). Então se o drone estiver inclinado ou em cima de uma superfície irregular, ele não vai permitir armar. Para resolver isso você tem duas opções: Ou você desliga o acelerômetro, ou você informa o angulo máximo de inclinação que o BetaFlight vai tolerar para armar.
Desligar o acelerômetro vai fazer o BetaFlight rodar mais rápido, mas vai impedir que você use o modo estabilizado. Para desligar o acelerômetro, vá no CLI e digite o seguintes comandos:
set acc_hardware = 1 save
Se você quiser manter o acelerômetro ligado, mas quiser permitir armar o drone inclinado, então os comandos são os seguintes:
set small_angle = 180 save
180 é a inclinação máxima (em graus). Com 180 o drone vai armar até de cabeça para baixo. Então use com cuidado.

O acelerômetro nunca foi calibrado.
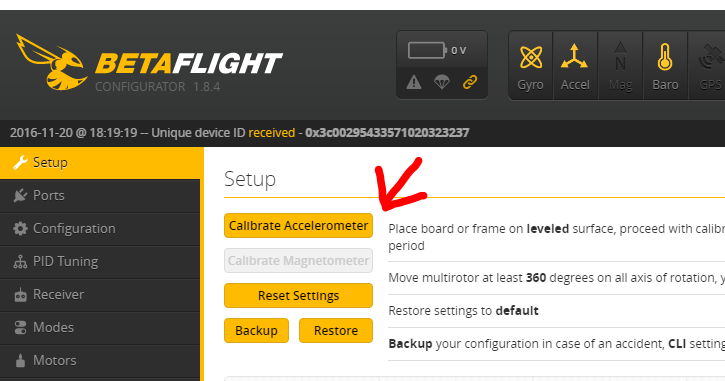
Se você mantém o acelerômetro ligado, você precisa calibra-lo pelo menos uma vez. Coloque o drone em uma superfície nivelada (no chão, de preferência), e com ele conectado ao computador, clique em “Calibrate Accelerometer” (fica na primeira aba, “Setup”).
Ou desligue o acelerômetro usando o comando CLI que eu ensinei no tópico anterior.
O acelerador não está totalmente abaixado.
Para armar, a alavanca do acelerador deve estar totalmente abaixada. O drone não vai armar se o valor do acelerador for superior a 1050.
Se mesmo com o acelerador no mínimo o drone não arma, conecte o drone ao computador, abra o BetaFlight, na aba “Receiver”, verifique o valor do canal “Throttle”. Se ele for superior a 1050, provavelmente você precisa ajustar os endpoints das sua alavanca de acelerador. Aproveite para conferir todas.
Todas elas devem ficar assim:
Mínimo 1000
Máximo 2000
Meio 1500
Evite usar Dual Rate, Endpoints e Expo no rádio. Em drones você sempre ajusta estes parâmetros na controladora, e nunca no rádio.
A carga da CPU está alta demais.
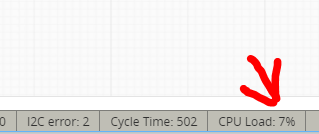
Você pode conferir o uso da CPU na barra de status do BetaFlight (na parte inferior). Se o CPU Load estiver acima de 30%, a controladora está ocupada demais para controlar o voo. Isso acontece quando sua controladora está fazendo tarefas demais, ou está configurada para fazer as tarefas muito rapidamente (mais rápido do que ela é capaz de fazer).
A primeira medida é reduzir a frequência do loop. Se você está com 4k, coloque 2k. Se está com 2k, coloque 1k. Se já está em 1k e ainda assim o CPU Load está acima de 30%, então você tem outro problema, pois 1k tem que funcionar até nas controladoras mais antigas.

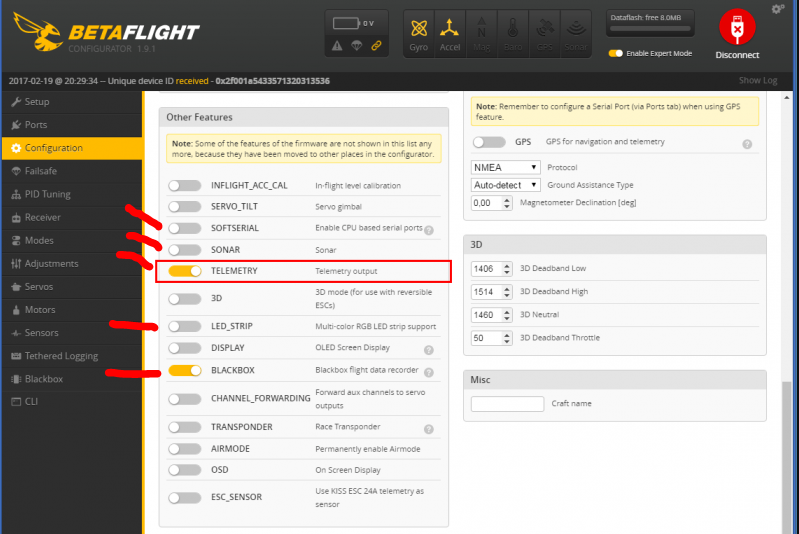
Verifique se você está usando “Led Strip”, “CPU Based Serial Ports”, “Telemetry”, “Blackbox”, e desligue caso esteja.
Se ainda assim o uso de CPU estiver alto, desligue o acelerômetro. Desligue o barômetro e a bussola também se sua controladora tiver estes sensores.