
Como escolher uma boa controladora de voo
Hoje em dia existem dezenas de opções diferentes para controladoras de voo. Muitas destas controladoras possuem aplicações específicas, enquanto outras são de uso mais geral. Para escolher a melhor para o seu projeto, você deve observar as especificações e identificar as características que melhor se adaptam às suas necessidades.
Identificar as suas necessidades
O primeiro passo ao escolher uma placa controladora é identificar quais são as suas reais necessidades. Para isso você precisa ter uma ideia do tipo de aeronave que está pensando em construir, e qual firmware você pretende usar.
- Você vai construir uma aeronave multi-rotor ou uma com asa fixa?
- Além da controladora, quais outros eletrônicos você pretende integrar? (VTX, GPS, Câmeras, Leds, PDB, UBECs, sensor de corrente, Telemetria, outros sensores)
- Você tem limitações de espaço físico para alocar a placa controladora e os demais eletrônicos?
- O peso é uma grande preocupação?
- Você precisa de OSD integrado?
- Se for um Multi-rotor, precisa de PDB ou de ESCs integrados à controladora?
- A velocidade de processamento é uma grande preocupação?
Com as respostas para estas perguntas, fica mais fácil determinar quais características você procura em uma placa controladora de voo. Vamos a elas:
Uso específico ou uso geral
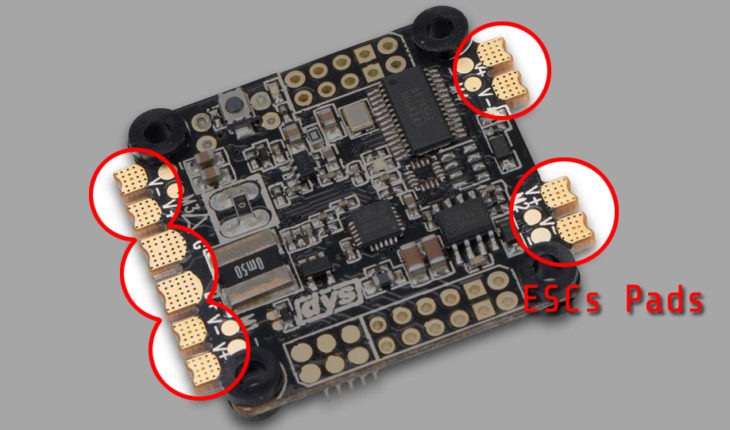
Existem controladoras feitas para uso muito específico, e controladoras feitas para uso geral. Controladoras criadas exclusivamente para drones de corrida, por exemplo, possuem características únicas, como giroscópios de altíssima frequência (32kHz), regulador de tensão integrado e com filtragem de energia, e interface extremamente simplificada, geralmente abrindo mão de algumas conexões desnecessárias. Por exemplo, controladoras especificas para drones de corrida geralmente possuem as conexões dos motores em suas extremidades, e raramente possuem mais do que 4 saídas para motores e duas ou três portas seriais.
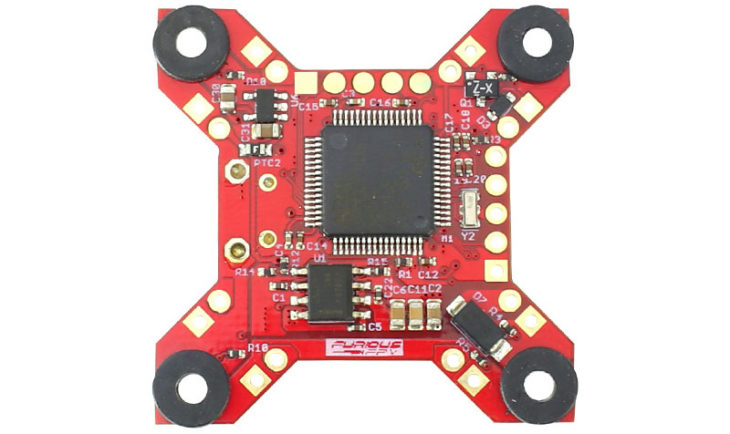
Fortini F4 da FuriousFPV – Apenas o necessário para um drone de corrida.
Já controladoras de uso geral são aquelas que tem maior compromisso com a quantidade de conexões e possibilidade de soldar pinos metálicos. Essas funcionam tanto para multi-rotores (tricópteros, quadricópteros, hexacópteros, octa, etc) quanto para aeronaves de asa fixa (aviões, asas voadoras, planadores, etc). O giroscópio não é tão rápido, porém é mais tolerante a vibração. Além disso, elas podem ter sensores adicionais como barômetro e bússola.
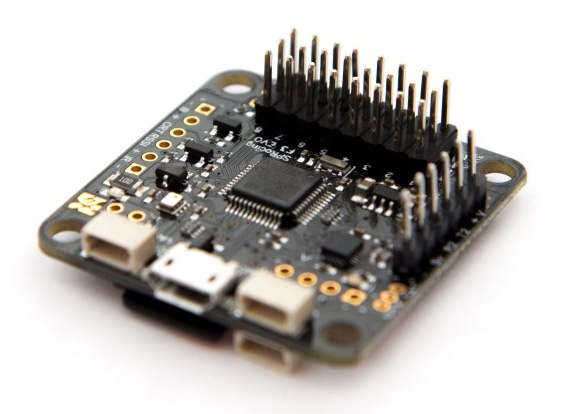
SP Racing F3 EVO – Muitas conexões e possibilidade usar pinos metálicos.
Quantidade de portas seriais (UARTs)
A quantidade de portas seriais vai determinar quantos dispositivos externos você irá conseguir integrar com a controladora. O mais básico deles é o receptor de rádio, que possui conexão SBUS (ou IBUS, XBUS, Spektrum, CSRF, etc). Mas diversos outros dispositivos podem ser conectados a controladora, tais como GPS, Telemetria do Rádio (SmartPort, Rádio LTM, MSP, etc), Telemetria do transmissor de vídeo (SmartAudio ou Tramp), OSD externo (MinimOSD), controle de câmera HD (Runcam Split), entre outros.
Cada um deles consome uma UART, então você precisa planejar antecipadamente quais dispositivos planeja ligar, para então escolher a melhor controladora.
Normalmente, a quantidade de UARTs depende do tipo de processador usado pela controladora.
- F1 tem duas UARTs, e pode ter mais duas portas SoftSerial.
- F3 tem três UARTs, e pode ter mais duas portas SoftSerial.
- F4 tem cinco UARTs, e pode ter mais duas portas SoftSerial.
- F7 tem oito UARTs.
Porém, fique atento: Muitas controladoras não disponibilizam todas as UARTs possíveis para a CPU. Algumas controladoras também podem compartilhar uma UART com a conexão USB, o que pode exigir medidas para contornar esta limitação. Além disso, nem todas as controladoras permitem ativar SoftSerial. É importante estudar cada controladora candidata antes de escolher.
Nível de integração
Existem controladoras com todos os níveis de integração. Algumas controladoras não vem nem mesmo com uma interface USB/Serial (como a CC3D por exemplo, que emula a interface por software), enquanto outras são extremamente integradas (possuem UBEC, OSD, ESCs e diversos sensores em uma única placa). Vou detalhar alguns aspectos:
Bússola e Barômetro
Algumas controladoras possuem Bússola e/ou Barômetro integrado. Estes sensores só são uteis em aeronaves que terão pilotagem autônoma. Em mini-quadricópteros (drones de corrida) estes sensores não são usados. As controladoras criadas especificamente para estes drones de corrida não possuem esses sensores.
OSD
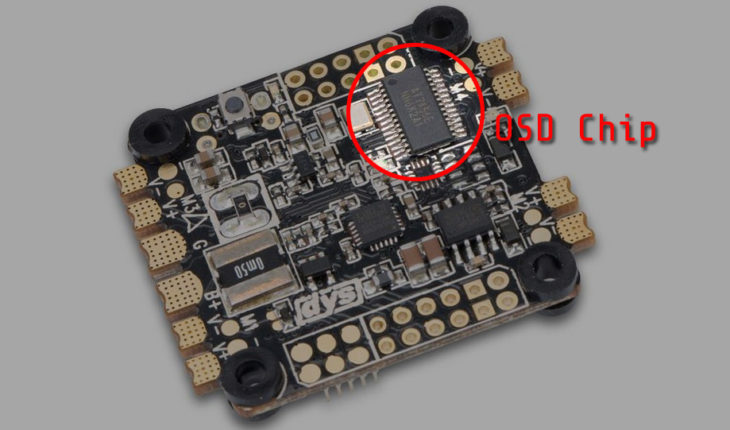
Cada vez mais comum, o OSD integrado facilita muito o uso de um OSD. Antes era necessário dispor de uma UART apenas para o OSD, além de ter uma placa separada ocupando mais espaço e usando mais fios. OSD integrado na controladora torna tudo mais simples e a instalação fica mais limpa, além de liberar uma UART.
UBEC
Toda controladora precisa de uma fonte de energia de 5V para funcionar. A forma mais comum de prover esta fonte para a controladora é usando uma PDB com UBEC integrado. Porém é cada vez mais comum encontrar controladoras que aceitam energia diretamente da bateria (de 2S a 6S), pois possuem UBEC integrado e não dependem de um UBEC externo. O UBEC normalmente não é muito potente, mas é suficiente para alimentar a própria controladora, o receptor de rádio e uma câmera de baixo consumo.
PDB
A principal função da PDB é distribuir a energia da bateria para os ESCs. Algumas PDBs também tem UBEC integrado. As controladoras AIO (All in One) são aquelas que unem a PDB e a controladora em uma única placa. Normalmente elas são um pouco maiores do que as controladoras convencionais, pois possuem ilhas de solda para os ESCs. Esse tipo de controladora também tem UBEC integrado.
ESCs
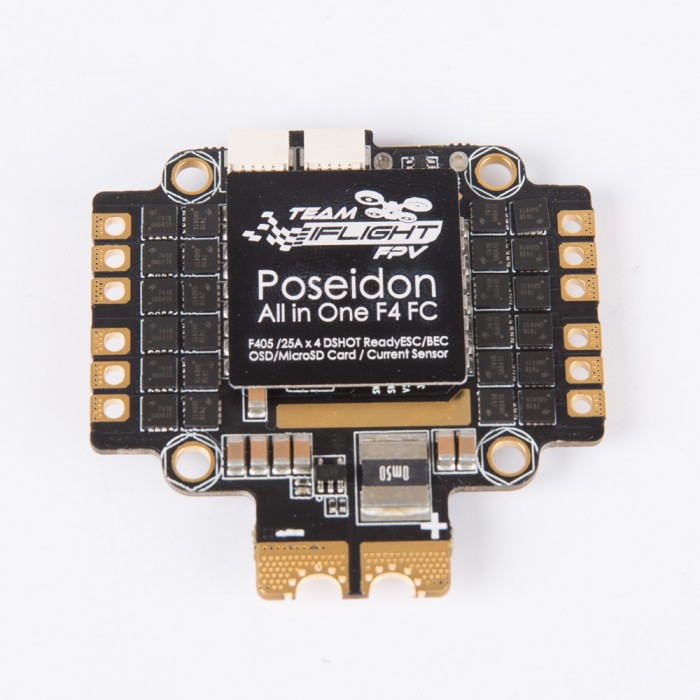
Algumas controladoras conseguem integrar até mesmo ESCs. São 4 ESCs em uma única placa, dividindo espaço com a controladora. A vantagem é que a instalação fica extremamente limpa e leve. A desvantagem é que você terá que substituir a placa inteira caso algum dos ESCs apresente problema.
Compatibilidade com diferentes firmwares
Os principais Firmwares atualmente são o BetaFlight e o InavFlight. Embora a maioria das controladoras seja suportada por ambos os firmwares, nem todas são. Então é sempre bom conferir antes se o firmware que você deseja usar será compatível com a controladora que você pretende usar.
Velocidade de processamento
Existem basicamente quatro Microcontroladores usados em placas controladoras de voo. Todos eles são fabricados pela STM Electronics, todos são de 32 bits, mas possuem pequenas diferenças que alteram as capacidades de cada controladora.
STM32F1 = Também chamados apenas de “F1”, são a primeira geração de controladoras de 32 bits. As mais conhecidas são a Naze32 e a CC3D. Funciona a 72Mhz. Controladoras que usam esta CPU são consideradas obsoletas, e já não são mais suportadas pelas versões mais recentes do BetaFlight e do Inav. Ao usar essas controladoras, você ficará limitado às versões antigas destes programas.
STM32F3 = Conhecidos apenas por “F3”, são a segunda geração de controladoras de 32 bits. Existem dezenas de controladoras diferentes que usam esta CPU, sendo as mais conhecidas a SP Racing F3, a Omnibus F3, a Lux Racer F3, entre outras. CPUs F3 também funcionam a 72Mhz, porém possuem um co-processador matemático integrado, que auxilia MUITO nos cálculos de números de ponto flutuante. Portanto na prática são mais bem mais rápidas do que a CPU F1.
STM32F4 = ou apenas “F4”, é a CPU mais utilizada em novos projetos de controladoras. Existem dezenas (talvez até uma centena) de diferentes controladoras usando esta CPU. Ela funciona a 180Mhz, portanto, é bem mais rápida do que a F3. É capaz de rodar o BetaFlight com PID Loop de 16kHz com folga (significa que o algoritmo de estabilização acontece 16 mil vezes por segundo!). Uma desvantagem, no entanto, é que as UARTs do chip F4 não podem ser invertidas por software, então a placa deve ter inversores de hardware, o que exige um certo planejamento na hora de usar dispositivos que precisam de inversão (como SBUS e SmartPort).
STM32F7 = ou apenas “F7”, é a CPU mais rápida e completa disponível atualmente (além de mais cara, é claro). Existem algumas controladoras que já usam esta CPU, como a KISS FC V2 e a Omnibus F7. Ela não possui desvantagens em relação aos modelos anteriores (exceto pelo preço). Roda a 216Mhz.
Exemplos
SP Racing F3
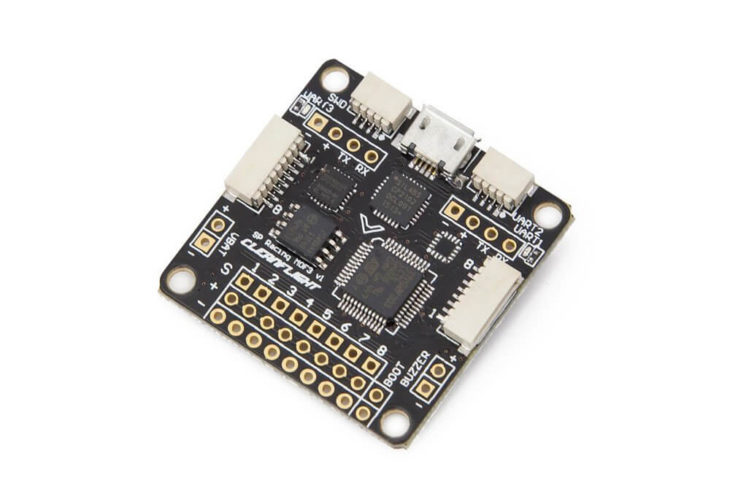
É uma controladora relativamente antiga, mas ainda muito popular. Suportada pelo CleanFlight, BetaFlight e Inav, é capaz de executar todas as versões sem problemas.
Ela não possui muitos recursos integrados. Não tem UBEC, nem OSD. Mas ela tem OITO saídas PWM para ESCs ou Servos. Ela também tem 3 UARTs e possibilidade de usar mais duas SoftSerial, saída para LED Strip, Buzzer, e entrada para VBat, Current Sensor e RSSI.
Ela permite inversão em todas as portas seriais (para quem usa Sbus e SmartPort é uma boa notícia). E a versão Deluxe (10-DOF) conta ainda com barômetro e bússola!
É uma ótima controladora para uso geral, tanto para asa fixa quanto para drones. Se você quiser comprar uma, clique aqui!
Racerstar StarF4

A controladora StarF4 da Racerstar é altamente integrada, possui em uma única placa:
- 4 ESCs de 30A com suporte a DShot600
- Controladora F4 com 3 UARTs disponíveis, saída para LED Strip e Buzzer
- OSD
- UBEC de 1.5A
- Sensor de corrente
Esta placa tem aproximadamente metade do peso que todos estes componentes teriam se fossem feitos em placas separadas e conectados por fios. É uma ótima forma de construir um drone leve, sem bagunça e sem abrir mão dos recursos mais necessários.
Para comprar a StarF4, clique aqui.
Holybro Kakute AIO F4
Esta controladora também tem boa integração, possui UBEC próprio, OSD e uma PDB para ligar os ESCs. Ela possui 3 UARTs disponíveis para uso, Buzzer, Led Strip e sensor de corrente. É uma ótima opção para drone racer. Clique aqui para comprar!
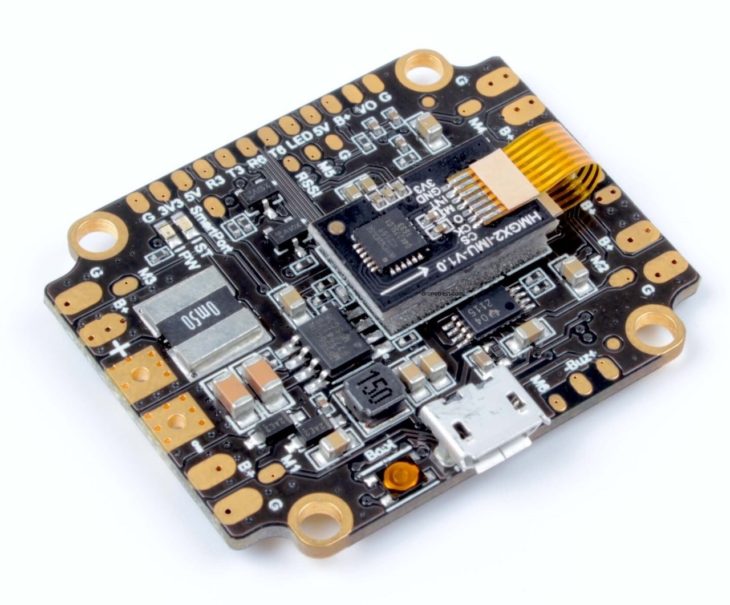
Airbot Omnibus F4 PRO
A Omnibus F4 é uma controladora de uso geral com boa integração entre componentes. Ela possui OSD e UBEC integrado, um slot para cartão SD (para log de voo – caixa preta). Além disso ela conta com 6 saídas PWM (para motores e servos), 4 UARTs, entradas para VBat, RSSI e Sensor de corrente e saída para Buzzer e Led strip. Ela é “ok” para mini drones, mas funciona muito bem em drones maiores e asa fixa.
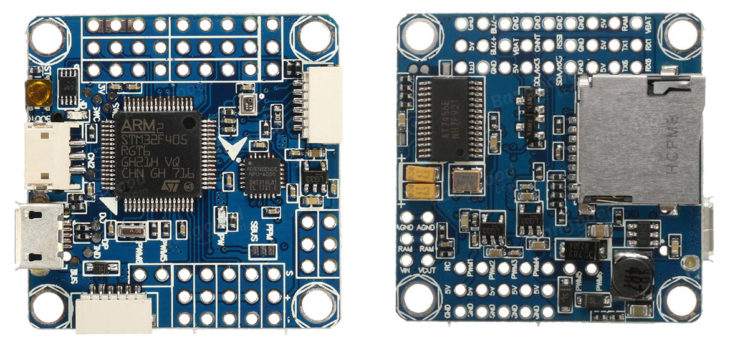
Matek F405 Mini
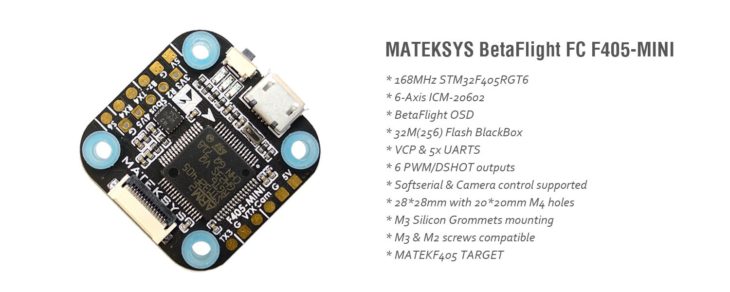
Esta controladora é diferente das outras. Ela possui apenas 20x20mm, foi criada para os micro-drones. Apesar de seu tamanho minúsculo, ela possui praticamente todos os recursos de uma controladora maior do mesmo tipo: OSD, 5 UARTs, Buzzer, Led Strip, entrada para Vbat, Rssi e Sensor de corrente.
Ela ainda possui um chip de memória de 32MB para Blackbox! Algo não muito comum de se ver.
Ela só não possui UBEC próprio, sendo portanto necessário providenciar alimentação específica para ela. A boa notícia é que ela foi feita para ser usada junto com o VTX da Matek, que possui UBEC e pode alimentar a controladora.